


Research project
OWS-6 - OGC Web Services Phase 6
OWS testbeds are part of OGC's Interoperability Program, a global, hands-on and collaborative prototyping programdesigned to rapidly develop, test and deliver proven candidate specifications into OGC's Specification Program. We have been selected to participate in the OWS6 threads on “Decision Support Services” (DSS) and “Geo Processing Workflow” (GPW) based on technologies from www.gdi-3d.de
We participated in the 6th OGC OWS testbed activity, a global, hands-on and collaborative prototyping program designed to rapidly develop, test and deliver proven candidate specifications into OGC's Specification Program, where they are formalized for public release.
We were involved in two threads for which we delivered valuable input
- Geo Processing Workflow (GPW)
- Decision Support Services (DSS)
The collaboration with GIS experts around the world was utilized to develop new service interfaces, use cases, realistic scenarios, and workflows. Interoperability was demonstrated by plugging in services and components from other partners into our client software. Also data provided by our OGC services was integrated into other partner’s software. It could be shown that components using established OGC standards could be combined with ease and very complex workflows can be realized that reflect the actual (geo) business requirements. OWS-6 included also many experimental interfaces and extensions for which we developed adaptors. Heidelberg University Cartography focused on the followings topics:
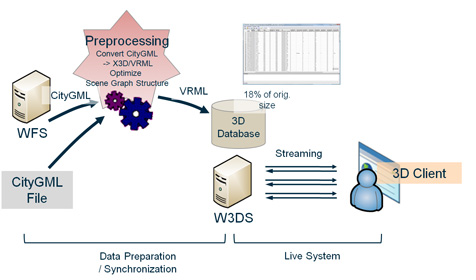
- Setting up and extending a Web 3D Service (W3DS) as experimental service interface for serving 3D geo content for visualization and navigation. The concept of how to connect a Web Feature Service (WFS) and a service to facilitate the streaming of 3D landscape and city models (W3DS). The objective was to download and synchronize data from WFS which is provided as CityGML with a 3D portrayal service. A CityGML loader and adaptor for our 3D database was therefore developed which can handle LOD1 – LOD4 models. The W3DS was also used as a data source for the indoor LOD4 model for the indoor routing in the DSS thread.
-
Enabling 3D indoor routing. On top of our already existing 3D outdoor routing which is already available in the projects heidelberg-3d.de and osm3d.org, we showed how 3D indoor routing can be implemented. The route calculation is based on a route network topology consisting of nodes, edges and cost attributes, and the A* algorithm. The network was derived from a geo-referenced CityGML indoor model. Indoor and outdoor paths were merged in order to create a single network which allows to route for instance from the fire station down the road and up to the building level where the fire broke out in a single step.
- Implementing an integrated client for accessing multiple OGC services in an emergency situation, based on the existing web client XNavigator. The integrated client is shown in the final OWS-6 demonstration videos in a hostage scenario and in a fire scenario.
The list of supported OGC services was extended and eventually included the following: Web 3D Service (W3DS), Web Feature Service (WFS) providing CityGML content, Catalog Service (CSW) implementing the ebRIM profile, Web Map Service (WMS), Web Map Tiling Service (WMTS), Sensor Observation Service (SOS), and Open Location Services (OpenLS), including the Route Service.
The results of the OWS-6 testbed was demonstrated in a special panel at the Technical Committee Meeting in Boston as well as in a webinar event and made public on the opengeospatial.org webpage as set of videos and slides.