



Event
Joint OpenStreetMap & Wheelmap Mapping Party on the 3rd December!
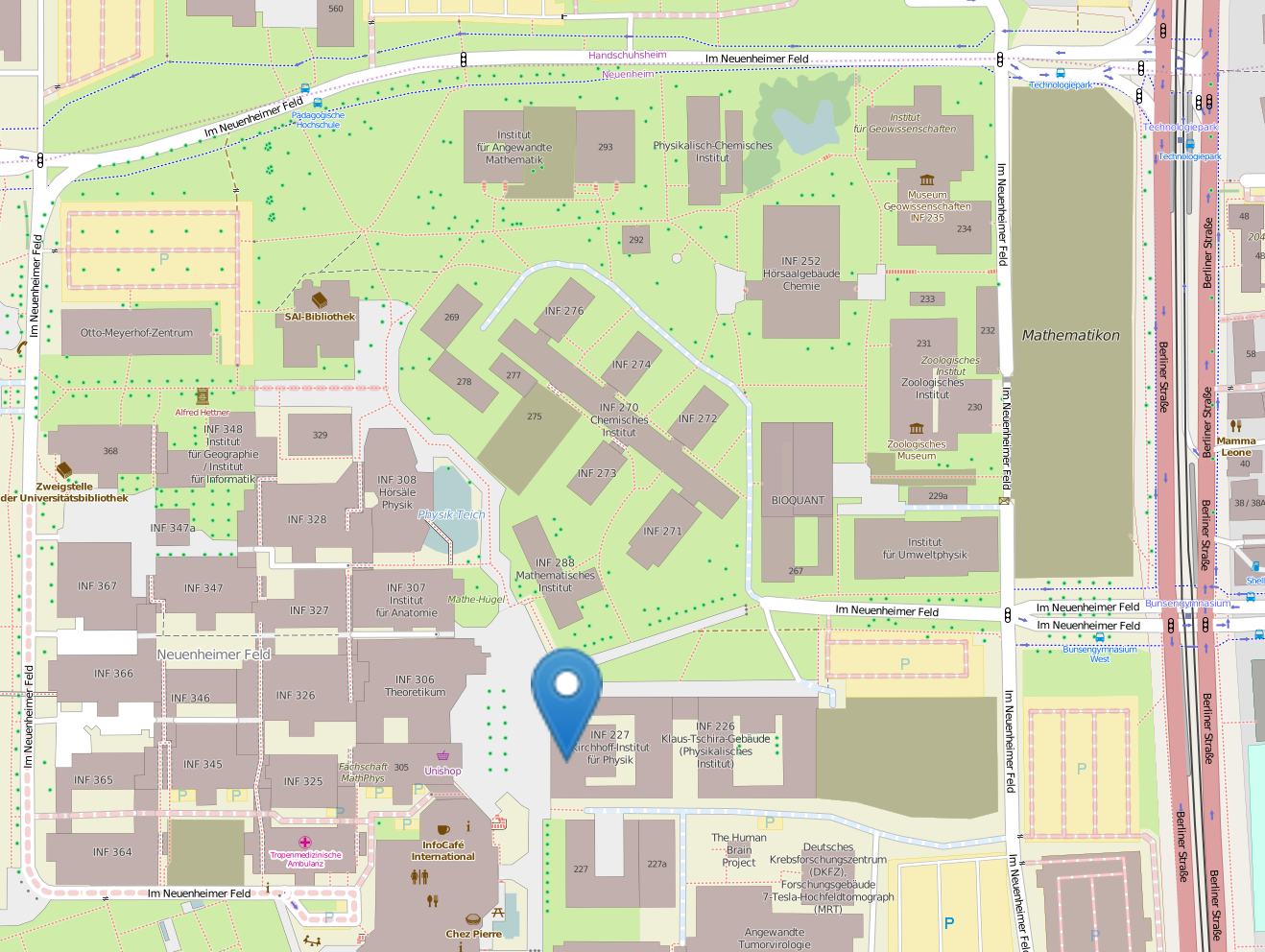
On the occasion of the International Day of Persons with Disabilities, the Institute of Geography at Heidelberg University invites interested persons to a joint OpenStreetMap & Wheelmap Mapping Party. This event is part of the EU project CAP4ACCESS.
Have you ever considered how you can get from A to B in (not only) Heidelberg using a wheelchair? Which places are accessible, which are partially accessible and which are not wheelchair accessible at all? Do you want to help improve free information that supports route planning for people with reduced mobility? Then feel free to join our Mapping Party!


Program (hands on!)
OpenStreetMap mapping based on street level imagery of Mapillary and our first prototype of the mobile tagging system
- OpenStreetMap is the Wikipedia of maps
- Anybody may contribute information to the map
- In route planning for people with reduced mobility, information on sidewalks is of particular importance
- The most important attribute is as to whether there exists a sidewalk next to a street at all
- Moreover, information on surface, smoothness, steps, ramps, sloped kerbs, barriers and pedestrian crossings are of high relevance
- In OpenStreetMap, this information is far from being complete
- The current Version of the OSM Editor (iD) is tested/used to map the respective attribute using street level imagery
- We will provide a short introduction to the mapping process (in German)

Wheelmap mapping of places on the university campus (Neuenheim)
- Wheelmap is an online map that collects information on the wheelchair accessibility of public places:
 green = wheelchair accessible
green = wheelchair accessible
 yellow = partially wheelchair accessible
yellow = partially wheelchair accessible
 red = not wheelchair accessible
red = not wheelchair accessible
 grey = unknown
grey = unknown - After a brief introduction about mapping for Wheelmap you will map places on the campus in teams of 2 to 3 people whose wheelchair accessibility is still unknown
- Furthermore, you map places that you visit on your everyday activities


Presentation: Quality of OpenStreetMap data (in German)
- 8pm
- Current research about OSM data quality and completeness
- Tools for the visualisation of OSM completeness
Please bring:
Editor:
Webmaster Team
Latest Revision:
2014-12-05